4. Configuring the sensors#
MISSIONPLANNER uses sensor parameters to calculate flight lines and trigger points.
After you create a project, you need to select a sensor or sensor system. You can also select multiple sensors.
4.1. Visualization of sensor settings#
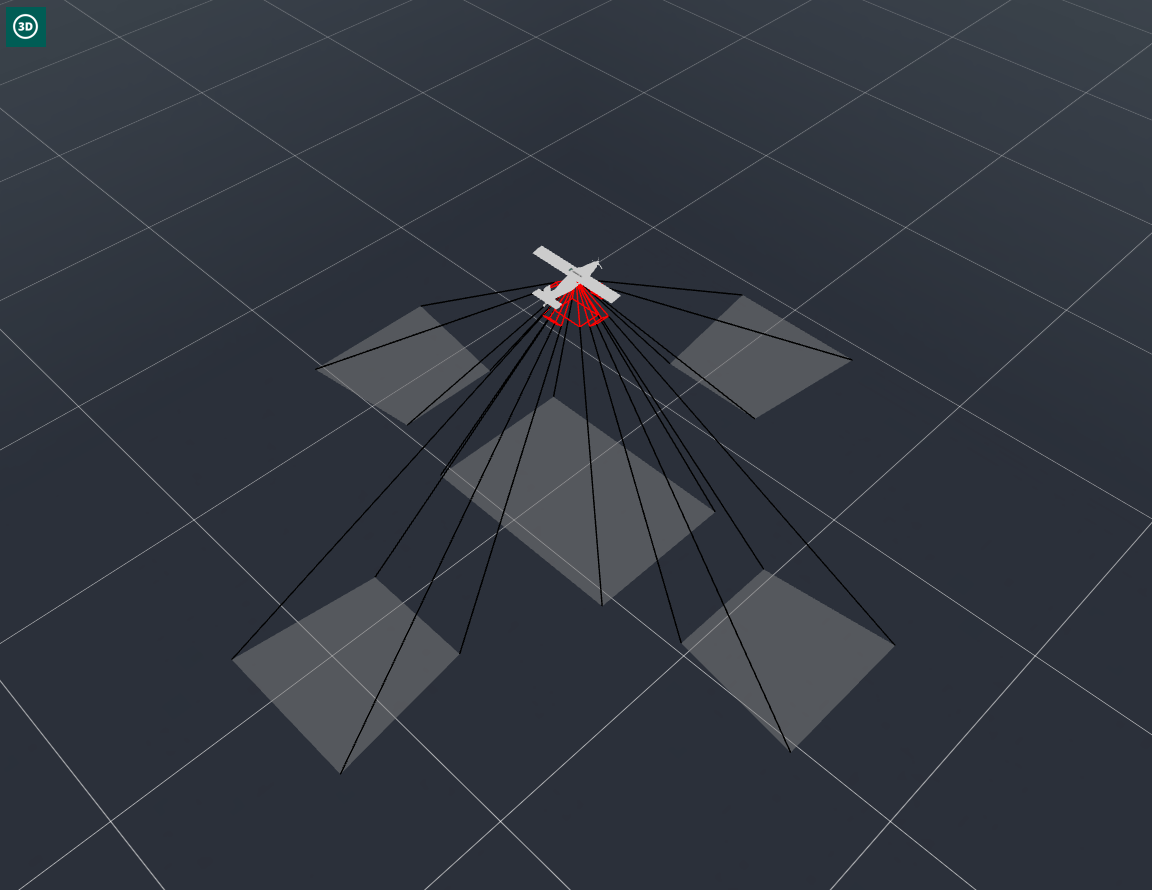
The depiction of the airplane in the main window provides an overview of the sensor settings on flat terrain.
Display settings
Use the parameters in Display settings in the main window to adjust different values.

Important
Changes to the HAGL will be transferred to the corresponding geometrical constraints in the camera settings.
Apart from the HAGL, you can modify the percentage of the forward and side overlap. The impact of these changes will be visible in the window above. This is particularly useful when working with sensor systems, as it allows for a comparison of the overlap for the nadir and oblique cameras. Please note that overlap estimation is only computed for almost parallel lines! Define the maximum intermediate angle for which overlaps will be calculated in the settings.
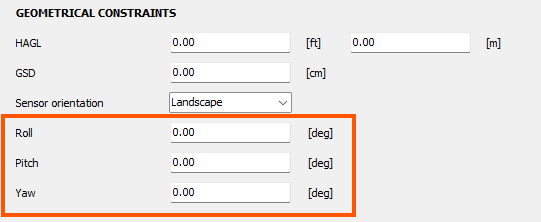
Geometrical constraints
The default geometric constraints are set with roll, pitch, and yaw angles at 0° for a forward orientation.
|

|
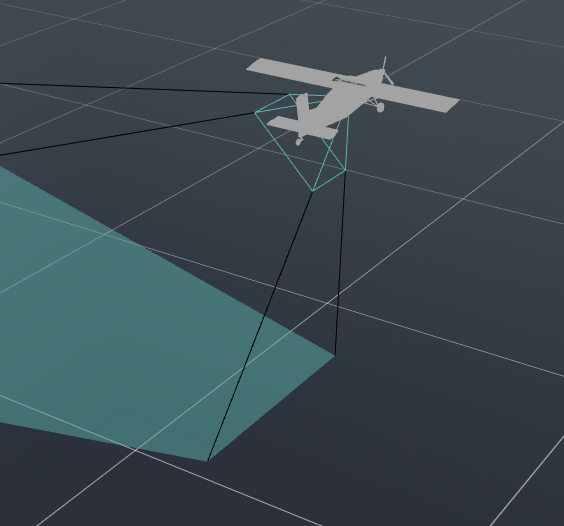
Example for a system using roll=90° (portrait), pitch=-45° (oblique sensor) and yaw=270° (left):
4.2. Adding sensors to the database#
Hint
Sensor information is always stored in the active project. If the project is shared across multiple MISSIONPLANNER installations, the software verifies the availability of sensor information in the database; if not found, it generates it.
4.3. Editing sensor information#
The TOPOFLIGHT online database provides read-only information on brands, models and configurations. Upon element selection the edit button(s) will remain disabled.
4.4. Deleting sensors from the database#
Important
This option is only available for user created elements.
4.6. LiDAR - RiParameter import#
The sensor parameters for Riegl’s LiDAR scanners are primarily optimized within the third-party application RiParameter.
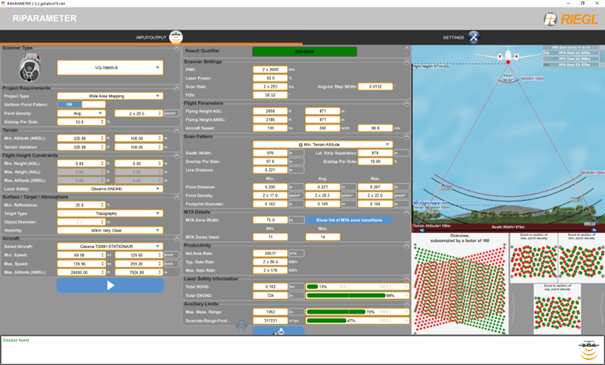
The ini-export of this application can be imported by MISSIONPLANNER.